
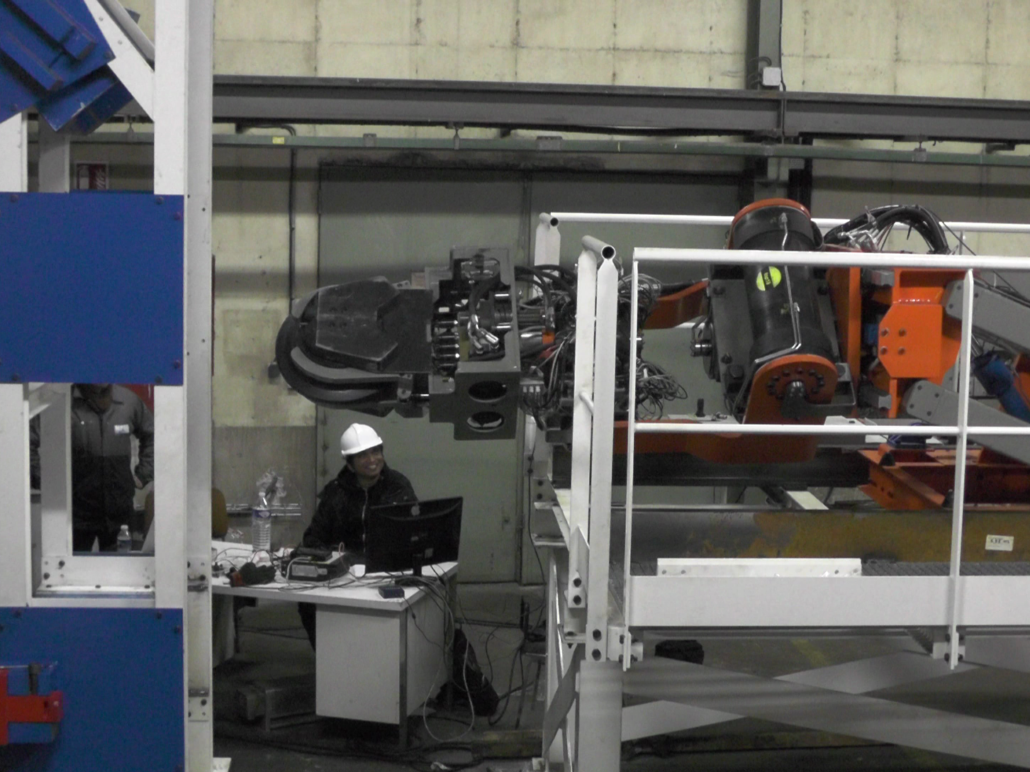
 Demonstration der Steuerung des Wartungsroboters. Foto: DFKI GmbH
Demonstration der Steuerung des Wartungsroboters. Foto: DFKI GmbHRoboter wartet Bohrwerkzeug beim Tunnelbau
Ein tiefgreifender Wandel im Tunnelbau war das Ziel eines internationalen Verbundprojekts, an dem sich das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) maßgeblich beteiligt hat. Das besondere Augenmerk lag dabei auf der Sicherheit, denn der Bau von Tunneln birgt zahlreiche Risiken, insbesondere bei der Wartung der Bohrmaschinen.
Die Projektpartner haben daher unter anderem ein robustes Wartungssystem entwickelt, das die Automatisierung von Routineaufgaben per Roboter ermöglicht, etwa die Inspektion und den Austausch von Bohrwerkzeugen. Das DFKI realisierte dabei die High-Level-Steuerung des Wartungsroboters “Hector”.
Das Projekt “Nettun” (Neue Technologien für Tunnel- und Tiefbauarbeiten) adressierte alle Aspekte des Tunnelbaus und zielte auf deren Verbesserung: vom Bau über das Management bis hin zur Wartung von Tunnelbauwerken. Dies beinhaltete u.a. die Entwicklung von Schneidwerkzeugen mit deutlich erhöhter Lebensdauer, eines modernen Multi-Sensor-Bodenvorhersagesystems sowie von Systemen zur Kontrolle der Auswirkungen des Tunnelbaus auf umgebende Strukturen.
Das Roboter-Wartungssystem für Tunnelbohrmaschinen ermöglicht neben der Automatisierung von Routineaufgaben auch die Bewältigung von komplexen Inspektions- und Wartungsarbeiten durch teilautonome Fernsteuerung. Auf diese Weise lässt sich zum Beispiel die Produktivität der Bohrarbeiten steigern, da Leerlaufzeiten während der Wartung vermieden werden. Gleichzeitig verringert sich das Risiko für die menschlichen Betreiber, deren Präsenz in der gefährlichen Umgebung nicht mehr unbedingt notwendig ist.
Weitere Informationen: www.dfki.de/robotik